 English
English Spanish
Spanish French
French German
German Italian
Italian Chinese (Simplified)
Chinese (Simplified) Japanese
Japanese Korean
Korean Arabic
Arabic Portuguese
Portuguese



Dc Position Control System, Dcp-301
Product Details:
- Material Electronics
- Weight 20 Kg Kilograms (kg)
- Usage Control Laboratory Experiment
- Application Control Laboratory Experiment
- Color Grey
- Type Control Lab Trainer
- Display Type Digital
- Click to View more
X
Dc Position Control System, Dcp-301 Price And Quantity
- 1 , , Set
Dc Position Control System, Dcp-301 Product Specifications
- 20 Kg Kilograms (kg)
- Digital
- Electronics
- Control Lab Trainer
- Grey
- Control Laboratory Experiment
- Control Laboratory Experiment
Dc Position Control System, Dcp-301 Trade Information
- Cash Against Delivery (CAD), Cash on Delivery (COD), Cash Advance (CA), Cash in Advance (CID), Cheque, Delivery Point (DP), Telegraphic Transfer (T/T)
- 100 , , Set Per Month
- 1 Week
- Contact us for information regarding our sample policy
- Complete in all respect
- Asia, Australia, Central America, North America, South America, Eastern Europe, Western Europe, Middle East, Africa
- All India
- ISO 9001: 2015 CE
Product Description
Dc Position Control System, Dcp-301
Focuses on product quality, diversity and geographical reach, we are engaged as manufacturer, supplier and exporter of DC Position Control System in Roorkee, Uttarakhand, India.
- Introduction
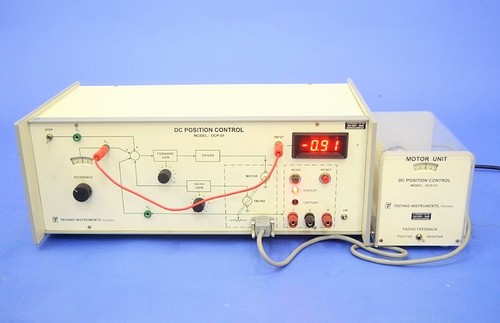
- One of the most common examples covered in text books and literature on linear systems is a d.c. position control system. This system is easily understood and has a second order transfer function in the standard form, for which a well developed theoretical treatment is available.
-
- This unit provides the students an opportunity to study and operate a practical electromechanical angular-position-control system. The system is built around a good quality permanent magnet armature-controlled d.c. motor, speed reduction gear-set, potentiometric error detector using special 360 revolution servo potentiometers, a tachogenerator for velocity feedback and associated electronic circuits. A PID controller with adjustable parameters is included. Unlike simulated systems, e.g. our LINEAR SYSTEM SIMULATOR, the position control system naturally consists of non-ideal parameters viz. saturation of amplifier and motor current, dead zone and backlash, nonlinearity in the motor and gears, imperfections in mechanical fabrication and somewhat uncertain order of the complete system due to filters, various time constants and load parameters. Experimental work on this system would enable the students to appreciate the difference in performance between idealized systems studied in the theory classes and the systems encountered in practice.
-
- A difficulty which is faced while working with many practical control systems is that their responses are rather slow (Note that in a simulated system the common practice is to scale-up the frequency to ensure a proper viewing on a CRO). A storage CRO or an X-Y plotter is therefore required for studying the wave forms. Both these instruments are too expensive and/or delicate, and are therefore not usually available to the undergraduate students in most institutions. The present unit has a built-in P based waveform capture/display system which stores the step response of the control system in a RAM and then displays it on a measuring CRO for further studies. This arrangement is extremely simple to operate and conforms to the accuracy needs of a class room experiment.
-
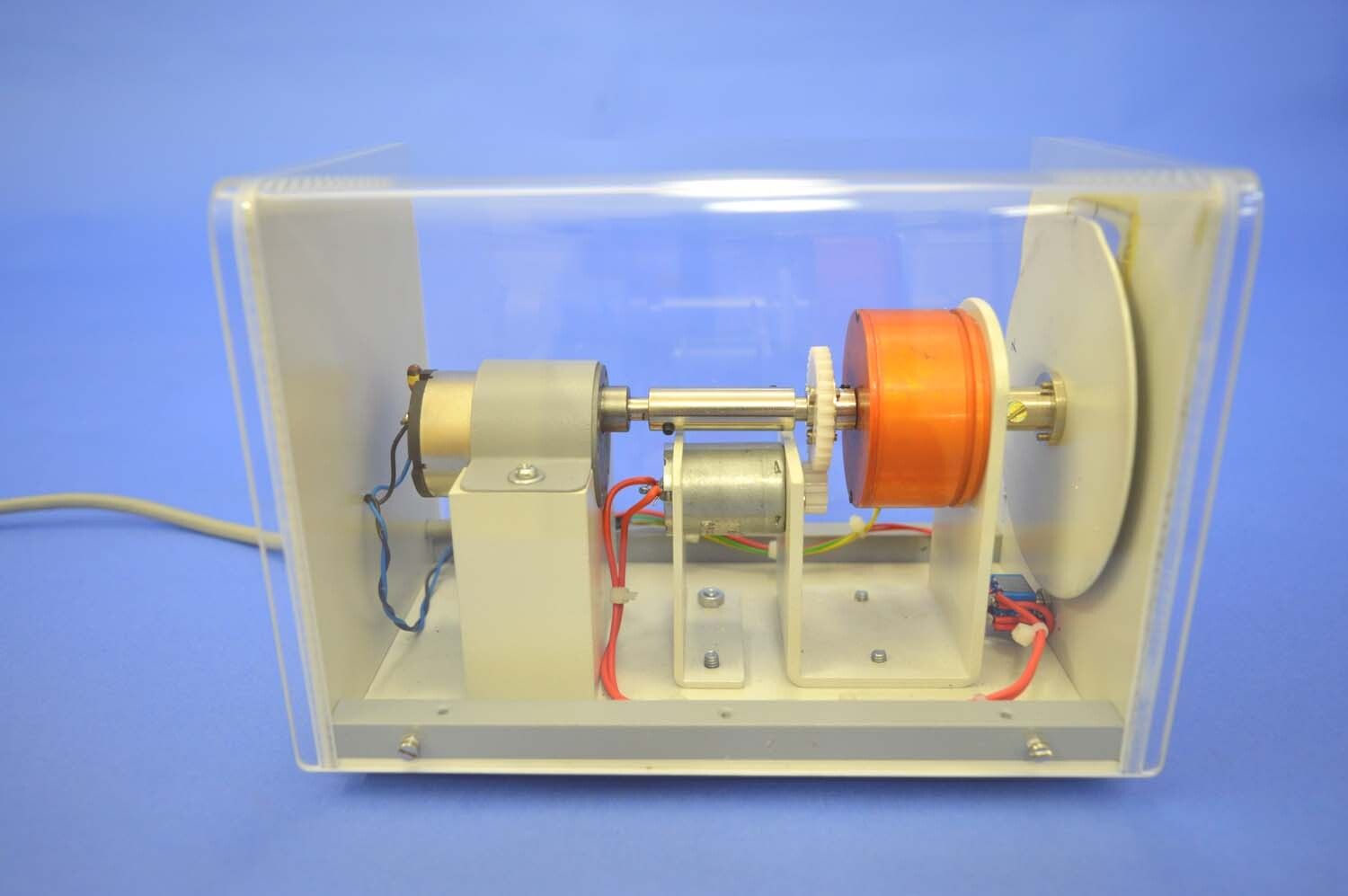
- The motor unit is housed in a separate cabinet with transparent panels for easy viewing. Interconnection with the main unit is through a standard 9-pin D-type connector. All power
- supplies and step input signal are internally provided. In addition a 3 digit DVM is available on the panel for the measurement of various.
-
- Features and Specifications
- Position control of a 12V, 1A d.c. gear motor (50 rpm)
- Provision for positive and negative tachogenerator feedback Tacho constant: 2V/1000 rpm approximately
- Calibrated dials for reference and output position: resolution 1
- Servo-potentiometers with full 360 rotation
- P based waveform capture/display card
- MATLAB interface provided
- Built-in 3 digit DVM for signal measurements
- Built-in step signal and IC regulated power supplies for electronic circuits
- Separate unit for motor in a see-through cabinet
- 220V10%, 50Hz mains operation
- Literature and patch cords included
- Essential accessories - a CRO
Advanced Control Lab Trainer
The DCP-301 DC Position Control System stands out as an essential tool in control laboratories, facilitating hands-on experiments for students and researchers alike. Its robust build and digital display technology ensure accuracy and ease of operation, while its ergonomic design makes incorporation into laboratory workflows seamless. Designed by leading exporters, manufacturers, and suppliers in India, it is a reliable solution for advanced academic and testing needs.
Efficient Experimentation and Easy Setup
With its dual weight options and intuitive digital interface, the DCP-301 enables swift setup and adjustment for a variety of position control experiments. The electronics-based material construction enhances its longevity and stability, making it a wise investment for laboratories seeking consistent performance and reproducibility in their experiments.
FAQ's of Dc Position Control System, Dcp-301:
Q: How does the DCP-301 DC Position Control System facilitate control laboratory experiments?
A: The DCP-301 enables precise control and measurement of position variables in lab experiments. Its digital display provides accurate feedback, supporting seamless monitoring and adjustment by users, which is vital for teaching and research activities in control engineering.Q: What are the advantages of using a digital display in the DCP-301 system?
A: A digital display ensures clear, instant readouts during experiments, minimizing errors and simplifying data collection. This improves experimental accuracy and allows users to track position changes and control responses efficiently.Q: When is it recommended to use the DC Position Control System in a laboratory setting?
A: The DCP-301 is ideal whenever position control experiments are required, such as during academic coursework, research projects, or demonstrations of control concepts. Its sturdy design and configurable weight options make it suitable for routine and advanced laboratory use.Q: Where can laboratories in India acquire the DCP-301 Position Control System?
A: Laboratories across India can obtain the DCP-301 from authorized exporters, manufacturers, and suppliers specializing in control laboratory instruments. Reliable sources ensure genuine products and comprehensive after-sales support.Q: What is the setup process for the DCP-301 in a control laboratory?
A: Installation involves placing the instrument on a stable surface, connecting electrical components according to the provided manual, and calibrating the system using its intuitive controls and digital display. This allows quick initiation of experiments with minimal hassle.Q: What benefits does the DCP-301 offer for academic and research laboratories?
A: The DC Position Control System enhances experimental learning by providing real-time feedback, reliable performance, and versatile application options. Its user-friendly design and accurate outputs make it invaluable for both teaching and advanced research in control systems.Tell us about your requirement

Price:
Quantity
Select Unit
- 50
- 100
- 200
- 250
- 500
- 1000+
Additional detail
Mobile number
Email

Other Products in 'Control Laboratory Experiments' category




Contact Details
- Building 452, Adarsh Nagar,Roorkee - 247667, Uttarakhand, India
- Phone : 07313725920
- Mr Ravi Prakash (Director)
- Mobile :07313725920
- Send Inquiry
- Landline : 91-1332-277118/ 272852
Direct No. :+919837072750
 Send Inquiry
Send Inquiry Send SMS
Send SMS Call Me Free
Call Me FreeSES INSTRUMENTS PVT. LTD.
All Rights Reserved.(Terms of Use)
Developed and Managed by Infocom Network Private Limited.
Developed and Managed by Infocom Network Private Limited.

